|
Seungjae Baek Email: qortmdwo9706(at)gmail.com I am a master's student in the Graduate School of Artificial Intelligence (AIGS) at Ulsan National Institute of Science and Technology (UNIST), advised by Professor Jeong hwan Jeon in the Robotics and Mobility Lab (RML). I was a visiting researcher at the Carnegie Mellon University Robotics Institute (CMU RI) (Aug. 2024 – Present, Remote: Mar. 2025 – Jul. 2025), collaborating with Professor Sebastian Scherer in the AirLab. My research focuses on informative path planning for robots, multi-robot systems, reinforcement learning, and reducing uncertainty in robotic decision-making, with an emphasis on system integration for robust autonomy in real-world environments. CV / GitHub / Google Scholar / LinkedIn |

|
News
|
Publications* indicates equal contribution. |
|
Sunhwi Kim, Junsu Kim, Seungjae Baek, Jungeun Lee, Jaechan Shin, Seongjae Lee, Kyungdon Joo, Jeong hwan Jeon IEEE International Conference on Robotics and Automation (ICRA) 2026 Project Page |
|
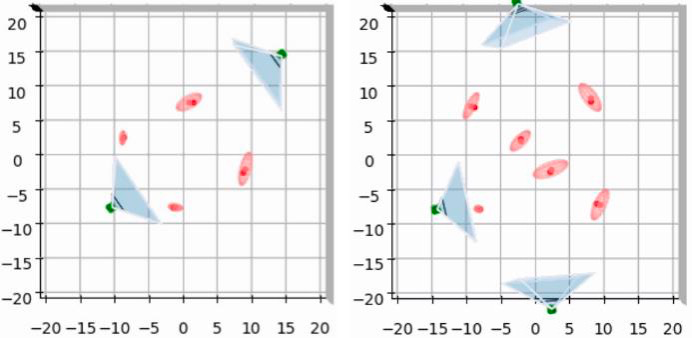
Seungjae Baek*, Brady Moon*, Seungchan Kim*, Muqing Cao, Cherie Ho, Sebastian Scherer, Jeong hwan Jeon IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025 Project Page | Paper | GitHub |
|
Kangbeen Lee*, Seungjae Baek*, Philjoon Jung, Tae-Hyun Kim, Jeong hwan Jeon Journal of Institute of Control, Robotics and Systems, 30(6) Paper | GitHub |
Preprints |
|
Under Double-blind Review as a co-first author Submitted to the 35th International Joint Conference on Artificial Intelligence (IJCAI 2026) |
Projects |
|
Dockerized SLAM for reproducible deployments and integrated multi-sensor and comms modules to enable autonomous mapping and data gathering. Aug. 2025 – Jan. 2026 |

|
Developed an eco-friendly AMoD fleet rebalancing framework using deep multi-agent reinforcement learning. Feb. 2024 – Dec. 2024 |
|
Project-Based Learning (PBL) course MEN491, implemented an autonomous race car platform as a team leader. Won 1st place in a university racing competition. Feb. 2023 – Jul. 2023 |
Teaching & Working Experiences |
 |
ITP117 Introduction to AI Programming II Ulsan National Institute of Science and Technology Head Teaching Assistant, Spring 2024 EEE351 Automatic Control Ulsan National Institute of Science and Technology Student Organization's Student Lecturer, Fall 2022 |
 |
Clinomics Inc. Project-Based Learning (PBL) Teaching Assistant, Feb. 2023 – Jul. 2023 |
Achievements |
|
IEEE IES SYPA Travel Award (IROS 2025) (USD 1,500) — IEEE Industrial Electronics Society (Oct. 2025)
Korean Government Scholarship Program for Study Overseas (USD 150,000) — Government of the Republic of Korea (Aug. 2026 – Aug. 2029, expected) Industrial Innovation Talent Growth Support (Overseas Linkage) (USD 21,500) — Korea University (Aug. 2025 – Jan. 2026) AI Excellence Global Innovative Leader Education Program (USD 40,000 incl. tuition) — Sogang University (Aug. 2024 – Feb. 2025) Government-funded Graduate Scholarship (2-year, fully funded) — Ministry of Science and ICT (Aug. 2023 – Aug. 2025) UNIST Academic Performance Scholarship (4-year, fully funded) — UNIST (Feb. 2017 – Aug. 2023) Undergraduate Research Excellent Poster Session Award — UNIST (Jul. 2023) |
Services |
|
Reviewer: IROS (2025), ICRA (2026), RA-L
|